















In the blueprint of Smart City and Intelligent Transportation Systems (ITS), the traffic vehicle detection system acts as the crucial “eyes” of the city. To implement adaptive signal control, green wave coordination, and precise traffic big data analysis, municipal departments rely on the real-time, highly accurate collection of traffic flow, speed, queue lengths, and headway spacing.
However, any traffic engineer who has managed a real-world urban intersection knows a painful truth: What works flawlessly in a controlled laboratory environment often hits a physical ceiling on chaotic city streets. When designing a robust system, engineering teams usually default to one of two standard sensor categories: pure vision (optical cameras) or standalone radar (millimeter-wave tracking). While both have matured significantly, real-world urban roads introduce non-linear, unpredictable variables that push single-sensor architectures beyond their physical limits.
To understand how to overcome these failures, we must first analyze the deep technical bottlenecks that plague traditional video traffic detection and radar traffic detection.
The Optical & Environmental Bottlenecks of Standalone Video Traffic Detection
Video traffic detection is favored globally because it replicates human vision, capturing rich semantic data such as lane-by-lane positioning, object classification, and spatial occupancy. However, because optical systems rely entirely on the reflection of ambient photons onto an image sensor, their accuracy is directly tethered to environmental visibility.
A.The Nighttime Dynamic Range & Glare Dilemma
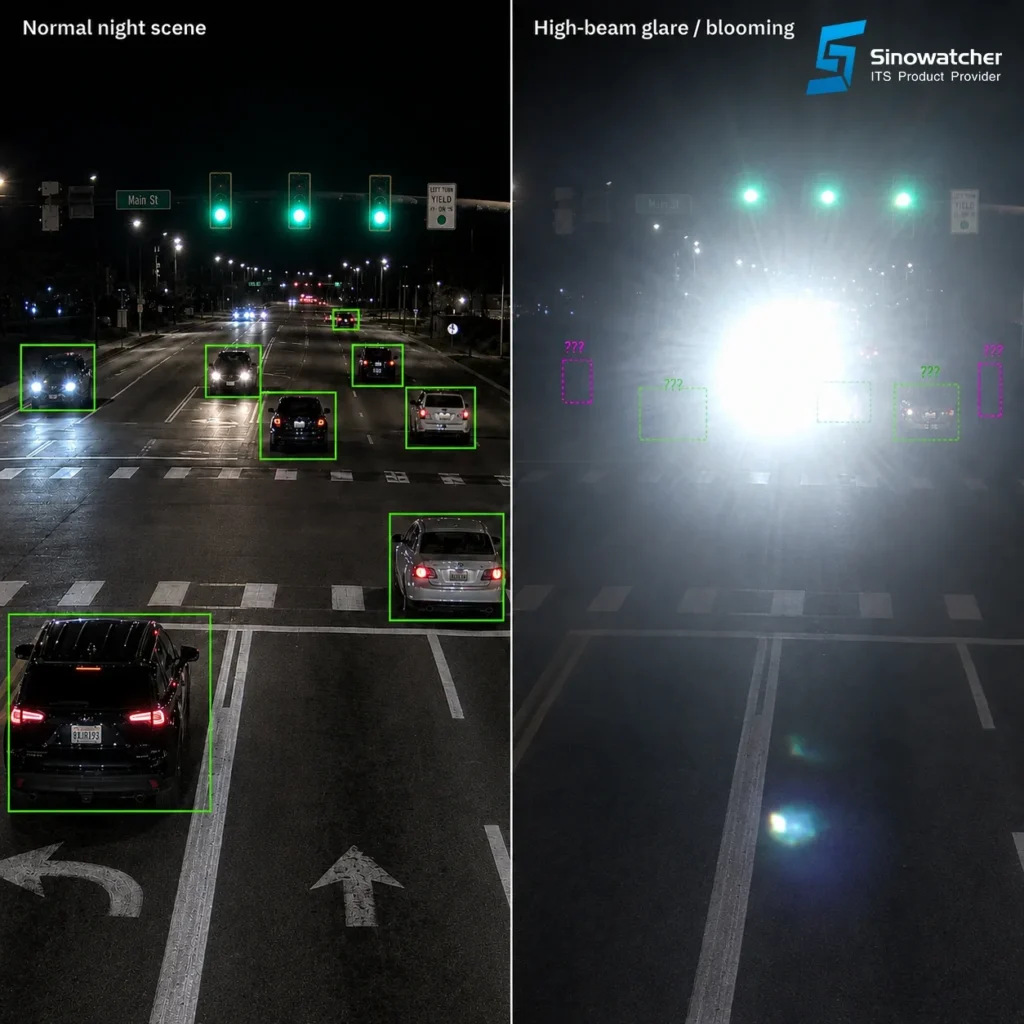
At a dark urban intersection, the dynamic range of a standard security camera is pushed to its absolute threshold.
- The High-Beam Washout: When vehicles approach with high-beam headlights or poorly aligned aftermarket LEDs, the oncoming photons flood the sensor’s pixels, causing pixel oversaturation or blooming,
- Algorithm Failure: To a standard detection algorithm, this bright white halo obliterates the actual physical boundaries, structural edges, and contours of the vehicle. Due to this profound loss of contrast, the system’s edge-detection mechanism fails to isolate vehicle boundaries from the intense glare. Consequently, the visual network frequently suffers from ‘target merging’ – where adjacent vehicles bleed into a single tracking block along with spiked false positive rates and missed tracking opportunities.
B.Severe Meteorological Attenuation

In ideal weather, light travels undisturbed. However, urban infrastructure must operate flawlessly during localized climate crises:
- The Rain Line and Lens Droplet Effect: Torrential rain creates physical “rain lines” in the air that break up visual continuity, while water droplets on the housing glass distort light like a warped lens. Standard background-subtraction or edge-detection algorithms get confused by the constant motion of rain streaks, leading to corrupted volume counts.
- The Fog Scattering Trap: Dense fog introduces microscopic water suspended in the air, causing Mie scattering. Light from streetlights and headlights bounces off the fog, lowering image contrast to near-zero. When contrast drops, the visual neural network can no longer extract feature vectors from the background, rendering the camera blind at distances beyond 30 to 40 meters.
2. The Spatial Geometry Defect: Perspective Occlusion
One of the most persistent structural challenges in video traffic detection stems from basic 3D-to-2D perspective projection. Cameras are inevitably mounted on elevated roadside poles or horizontal gantries, angling down toward the asphalt.
The Line-of-Sight Blockade

When a large commercial truck, a double-decker public transit bus, or a heavy container semi brings its massive footprint to a halt at a stop bar, it creates a massive. The towering truck completely obstructed the camera’s field of view, occupying the majority of the shooting range; simultaneously, it cast a blind spot – a shadow – upon the asphalt pavement directly behind it, even encroaching upon the adjacent lanes. Smaller vehicles trapped within this footprint fail to register a single pixel on the image sensor.
- The Disappearing Car: Because light travels in a straight line, smaller vehicles (such as compact sedans, scooters, and delivery e-bikes) trailing closely behind the truck are completely hidden within this shadow.
- Data Rupture: If the camera cannot capture even a few pixels of the hidden vehicle, the detection system logs the lane as “empty.” This leads to a massive undercounting of vehicle volume and completely corrupts the real-time queue length estimation required by adaptive traffic signal controllers to calculate proper green-light windows.
3. The Structural Blind Spots of Radar Traffic Detection Tracking.
To bypass the visual vulnerabilities of cameras, many ITS integrators turned to Radar Traffic Detection(standalone millimeter-wave radar). Radar sends out electromagnetic waves and measures the Doppler shift of the returned signals to determine speed and distance. While immune to weather, pure radar encounters a completely different set of physical and mathematical roadblocks in urban grids:
A.The Zero-Velocity / Stationary Target Trap Millimeter
Wave radar is highly efficient at detecting moving objects because moving targets create a distinct frequency shift (Doppler effect). However, when a wave hits a static object, it generates a stationary reflection.
- The Clutter Problem: In a dense city environment, static reflections come from everything: metal guardrails, concrete barriers, overhead signs, and roadside buildings. This is known as “clutter.”
- The Frozen Queue Flaw: To prevent clutter from overwhelming the processor, traditional radar filters out static reflections. The dangerous side effect? When a line of vehicles slows down and stops completely at a red light, they become static objects. The radar struggles to separate the stationary cars from the stationary metal guardrails, often causing the tracked targets to simply drop off the screen. Consequently, a standalone radar cannot reliably calculate continuous queue lengths or detect a stalled vehicle incident at an intersection.
B.Poor Target Classification and Grid Resolution
Radar operates on electromagnetic cross-section, not visual features.
- The Silhouette Deficit: A radar receiver detects a point cloud or a cluster of energy returns. It knows something massive is moving at 45km/h, but it cannot determine if that object is a long city bus, a passenger car towing a trailer, or three tightly packed motorcycles riding side-by-side.
- The Mixed Traffic Nightmare: At a chaotic urban intersection where lanes are shared by cars, delivery e-bikes, and pedestrians, standalone radar cannot accurately segregate them. This lack of classification intelligence prevents the traffic controller from prioritizing vulnerable road users or executing advanced transit signal priority.
The Integration Dilemma
If your intersection relies only on video, your system is vulnerable to blindness from a sudden midnight blizzard or blinding high beams. If your intersection relies only on radar, you lose the ability to classify vehicle types, identify non-motorized traffic, or track static queues reliably. Relying on a single sensor modality forces traffic engineers to accept flawed data.
What’s Next: Recognising these absolute physical barriers, how are modern engineers re-designing optical hardware to achieve over 95% detection accuracy under zero-light and occlusion?
Read Part 2: Defying the Limits of Vision: How Edge-AI and Blind Area Algorithms Solve Traffic Occlusion to find out.

")








