















Dans le projet de ville intelligente et de systèmes de transport intelligents (STI), le système de détection des véhicules agit comme les « yeux » cruciaux de la ville. Pour mettre en œuvre un contrôle adaptatif des signaux, une coordination des vagues vertes et une analyse précise des mégadonnées de trafic, les services municipaux s'appuient sur une collecte en temps réel et très précise du flux de circulation, de la vitesse, de la longueur des files d'attente et de l'espacement des voies.
Cependant, tout ingénieur de la circulation ayant géré un carrefour urbain réel connaît une vérité douloureuse : ce qui fonctionne parfaitement dans un environnement de laboratoire contrôlé atteint souvent un plafond physique dans les rues chaotiques des villes. Lors de la conception d'un système robuste, les équipes d'ingénierie utilisent généralement par défaut l'une des deux catégories de capteurs standard : vision pure (caméras optiques) ou radar autonome (suivi par ondes millimétriques). Bien que les deux aient considérablement évolué, les routes urbaines du monde réel introduisent des variables non linéaires et imprévisibles qui poussent les architectures à capteur unique au-delà de leurs limites physiques.
Pour comprendre comment surmonter ces échecs, nous devons d'abord analyser les profonds goulots d'étranglement techniques qui affectent la détection vidéo traditionnelle du trafic et la détection radar du trafic.
Les goulots d'étranglement optiques et environnementaux de la détection de trafic vidéo autonome
La détection vidéo du trafic est favorisée à l'échelle mondiale car elle reproduit la vision humaine, capturant de riches données sémantiques telles que le positionnement voie par voie, la classification des objets et l'occupation spatiale. Cependant, comme les systèmes optiques reposent entièrement sur la réflexion des photons ambiants sur un capteur d’image, leur précision est directement liée à la visibilité environnementale.
A. Le dilemme de la plage dynamique nocturne et de l’éblouissement
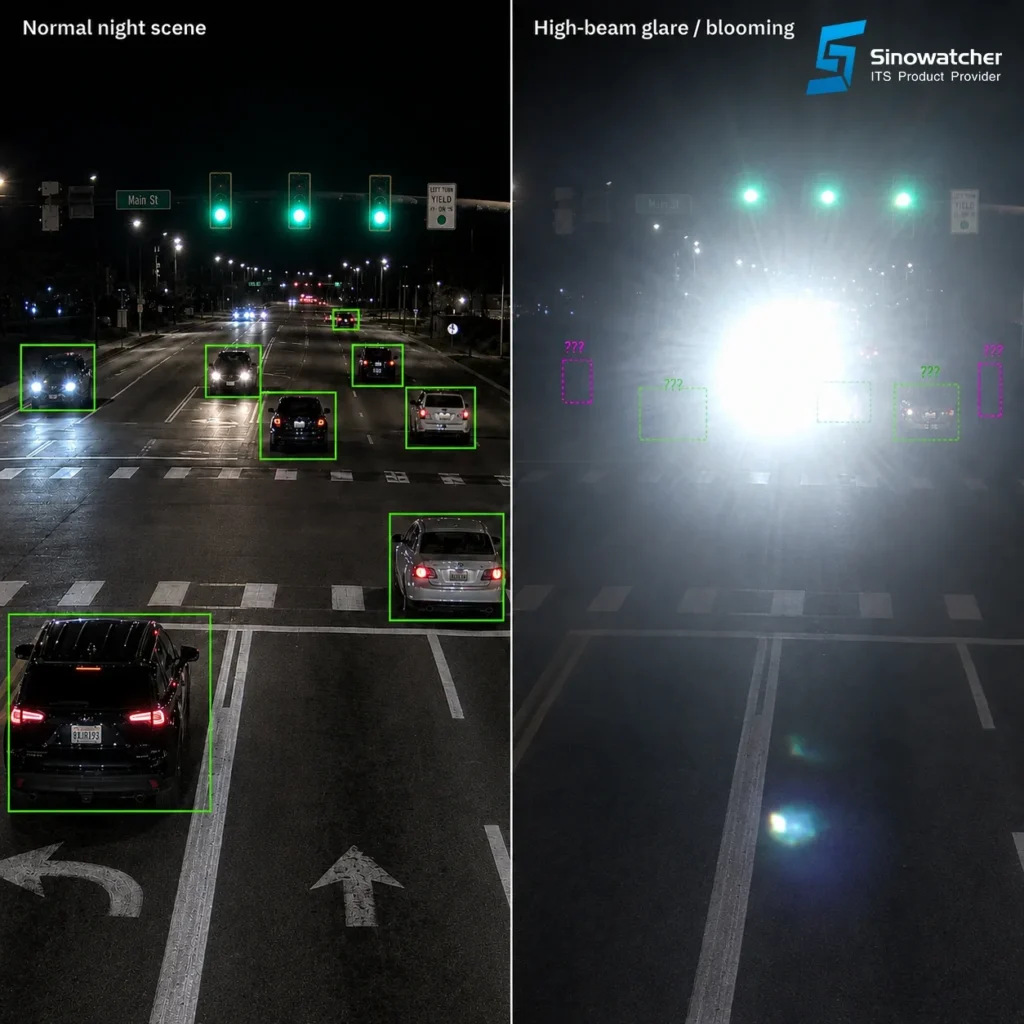
À une intersection urbaine sombre, la plage dynamique d’une caméra de sécurité standard est poussée à son seuil absolu.
- Le lavage des feux de route : Lorsque des véhicules s'approchent avec des feux de route ou des LED de rechange mal alignées, les photons venant en sens inverse inondent les pixels du capteur, provoquant une sursaturation ou une floraison des pixels,
- Échec de l'algorithme : Selon un algorithme de détection standard, ce halo blanc brillant efface les limites physiques réelles, les bords structurels et les contours du véhicule. En raison de cette profonde perte de contraste, le mécanisme de détection des contours du système ne parvient pas à isoler les limites du véhicule de l’éblouissement intense. Par conséquent, le réseau visuel souffre fréquemment d’une « fusion de cibles » – où les véhicules adjacents se fondent dans un seul bloc de suivi, accompagnés de taux de faux positifs élevés et d’opportunités de suivi manquées.
B. Atténuation météorologique sévère

Par temps idéal, la lumière se propage sans être perturbée. Cependant, les infrastructures urbaines doivent fonctionner parfaitement lors de crises climatiques localisées :
- L'effet de ligne de pluie et de gouttelettes de lentille : La pluie torrentielle crée des « lignes de pluie » physiques dans l’air qui brisent la continuité visuelle, tandis que les gouttelettes d’eau sur le verre du boîtier déforment la lumière comme une lentille déformée. Les algorithmes standards de soustraction d’arrière-plan ou de détection de contours sont perturbés par le mouvement constant des traînées de pluie, ce qui entraîne des décomptes de volumes corrompus.
- Le piège à diffusion de brouillard : Un brouillard dense introduit de l'eau microscopique en suspension dans l'air, provoquant une diffusion Mie. La lumière des lampadaires et des phares rebondit sur le brouillard, réduisant le contraste de l’image à près de zéro. Lorsque le contraste diminue, le réseau neuronal visuel ne peut plus extraire les vecteurs caractéristiques de l'arrière-plan, ce qui rend la caméra aveugle à des distances supérieures à 30 à 40 mètres.
2. Le défaut de géométrie spatiale : occlusion de perspective
L'un des défis structurels les plus persistants en matière de détection vidéo du trafic découle de la projection en perspective 3D vers 2D de base. Les caméras sont inévitablement montées sur des poteaux surélevés en bordure de route ou sur des portiques horizontaux, orientés vers l'asphalte.
Le blocus de la ligne de vue

Lorsqu'un gros camion commercial, un bus de transport en commun à deux étages ou un semi-conteneur lourd arrête son empreinte massive à une barre d'arrêt, cela crée un énorme. Le camion imposant a complètement obstrué le champ de vision de la caméra, occupant la majorité du champ de tir ; simultanément, il projetait un angle mort – une ombre – sur la chaussée asphaltée juste derrière lui, empiétant même sur les voies adjacentes. Les véhicules plus petits piégés dans cette empreinte ne parviennent pas à enregistrer un seul pixel sur le capteur d'image.
- La voiture qui disparaît : Étant donné que la lumière se déplace en ligne droite, les véhicules plus petits (tels que les berlines compactes, les scooters et les vélos électriques de livraison) qui suivent de près le camion sont complètement cachés dans cette ombre.
- Rupture de données : Si la caméra ne parvient pas à capturer ne serait-ce que quelques pixels du véhicule caché, le système de détection enregistre la voie comme « vide ». Cela conduit à un sous-dénombrement massif du volume de véhicules et corrompt complètement l'estimation de la longueur de la file d'attente en temps réel requise par les contrôleurs adaptatifs des feux de circulation pour calculer les fenêtres de feu vert appropriées.
3. Les angles morts structurels du suivi de la détection du trafic radar.
Pour contourner les vulnérabilités visuelles des caméras, de nombreux intégrateurs ITS se sont tournés vers la détection du trafic radar (radar autonome à ondes millimétriques). Le radar envoie des ondes électromagnétiques et mesure le décalage Doppler des signaux renvoyés pour déterminer la vitesse et la distance. Bien qu'insensible aux intempéries, le radar pur rencontre un ensemble complètement différent d'obstacles physiques et mathématiques dans les réseaux urbains :
A. Le piège à cible stationnaire/à vitesse nulle millimétrique
Le radar à ondes est très efficace pour détecter des objets en mouvement, car les cibles en mouvement créent un décalage de fréquence distinct (effet Doppler). Cependant, lorsqu’une onde frappe un objet statique, elle génère une réflexion stationnaire.
- Le problème du désordre : Dans un environnement urbain dense, les réflexions statiques proviennent de tout : garde-corps métalliques, barrières en béton, panneaux aériens et bâtiments en bordure de route. C’est ce qu’on appelle le « fouillis ».
- La faille de la file d'attente gelée : Pour éviter que l'encombrement ne surcharge le processeur, le radar traditionnel filtre les réflexions statiques. L’effet secondaire dangereux ? Lorsqu’une file de véhicules ralentit et s’arrête complètement à un feu rouge, ils deviennent des objets statiques. Le radar a du mal à séparer les voitures à l'arrêt des garde-corps métalliques fixes, ce qui fait souvent tomber les cibles suivies hors de l'écran. Par conséquent, un radar autonome ne peut pas calculer de manière fiable les longueurs de file d’attente continues ni détecter un incident de véhicule en panne à une intersection.
B. Mauvaise classification des cibles et résolution de la grille
Le radar fonctionne sur une section efficace électromagnétique et non sur des caractéristiques visuelles.
- Le déficit de silhouette : Un récepteur radar détecte un nuage de points ou un groupe de retours d'énergie. Il sait que quelque chose de massif se déplace à 45 km/h, mais il ne peut pas déterminer si cet objet est un long bus urbain, une voiture de tourisme tirant une remorque ou trois motos serrées roulant côte à côte.
- Le cauchemar du trafic mixte : À un carrefour urbain chaotique où les voies sont partagées par les voitures, les vélos électriques de livraison et les piétons, un radar autonome ne peut pas les séparer avec précision. Ce manque d’intelligence de classification empêche le contrôleur de la circulation de donner la priorité aux usagers de la route vulnérables ou d’exécuter la priorité avancée des feux de transit.
Le dilemme de l’intégration
Si votre intersection repose uniquement sur la vidéo, votre système est vulnérable à la cécité causée par une tempête de neige soudaine à minuit ou par des feux de route aveuglants. Si votre intersection repose uniquement sur le radar, vous perdez la capacité de classer les types de véhicules, d'identifier le trafic non motorisé ou de suivre de manière fiable les files d'attente statiques. S'appuyer sur une seule modalité de capteur oblige les ingénieurs de la circulation à accepter des données erronées.
Et ensuite : reconnaissant ces barrières physiques absolues, comment les ingénieurs modernes repensent-ils le matériel optique pour atteindre une précision de détection supérieure à 95% sous lumière nulle et occlusion ?
Lisez la partie 2 : Défier les limites de la vision : comment les algorithmes Edge-AI et les algorithmes de zone aveugle résolvent l'occlusion de la circulation pour le découvrir.

")








