















في مخطط المدينة الذكية وأنظمة النقل الذكية (ITS)، يعمل نظام الكشف عن المركبات المرورية بمثابة "العيون" الحاسمة للمدينة. لتنفيذ التحكم التكيفي في الإشارة، وتنسيق الموجة الخضراء، والتحليل الدقيق لبيانات حركة المرور الكبيرة، تعتمد الإدارات البلدية على جمع دقيق للغاية في الوقت الفعلي لتدفق حركة المرور، والسرعة، وأطوال قائمة الانتظار، وتباعد المسافة.
ومع ذلك، فإن أي مهندس مرور أدار تقاطعًا حضريًا في العالم الحقيقي يعرف حقيقة مؤلمة: ما يعمل بشكل لا تشوبه شائبة في بيئة معملية خاضعة للرقابة غالبًا ما يصل إلى السقف المادي في شوارع المدينة الفوضوية. عند تصميم نظام قوي، عادةً ما تعتمد الفرق الهندسية على إحدى فئتي أجهزة الاستشعار القياسية: الرؤية النقية (الكاميرات الضوئية) أو الرادار المستقل (تتبع الموجات المليمترية). في حين أن كلاهما قد نضج بشكل كبير، فإن الطرق الحضرية في العالم الحقيقي تقدم متغيرات غير خطية وغير متوقعة تدفع بنيات المستشعر الواحد إلى ما هو أبعد من حدودها المادية.
لفهم كيفية التغلب على هذه الإخفاقات، يجب علينا أولاً تحليل الاختناقات التقنية العميقة التي تواجه اكتشاف حركة مرور الفيديو التقليدية واكتشاف حركة مرور الرادار.
الاختناقات البصرية والبيئية للكشف عن حركة مرور الفيديو المستقلة
يُفضل اكتشاف حركة مرور الفيديو عالميًا لأنه يكرر الرؤية البشرية، ويلتقط البيانات الدلالية الغنية مثل تحديد المواقع في كل حارة، وتصنيف الكائنات، والإشغال المكاني. ومع ذلك، نظرًا لأن الأنظمة البصرية تعتمد كليًا على انعكاس الفوتونات المحيطة على مستشعر الصورة، فإن دقتها مرتبطة مباشرة بالرؤية البيئية.
أ.النطاق الديناميكي الليلي ومعضلة الوهج
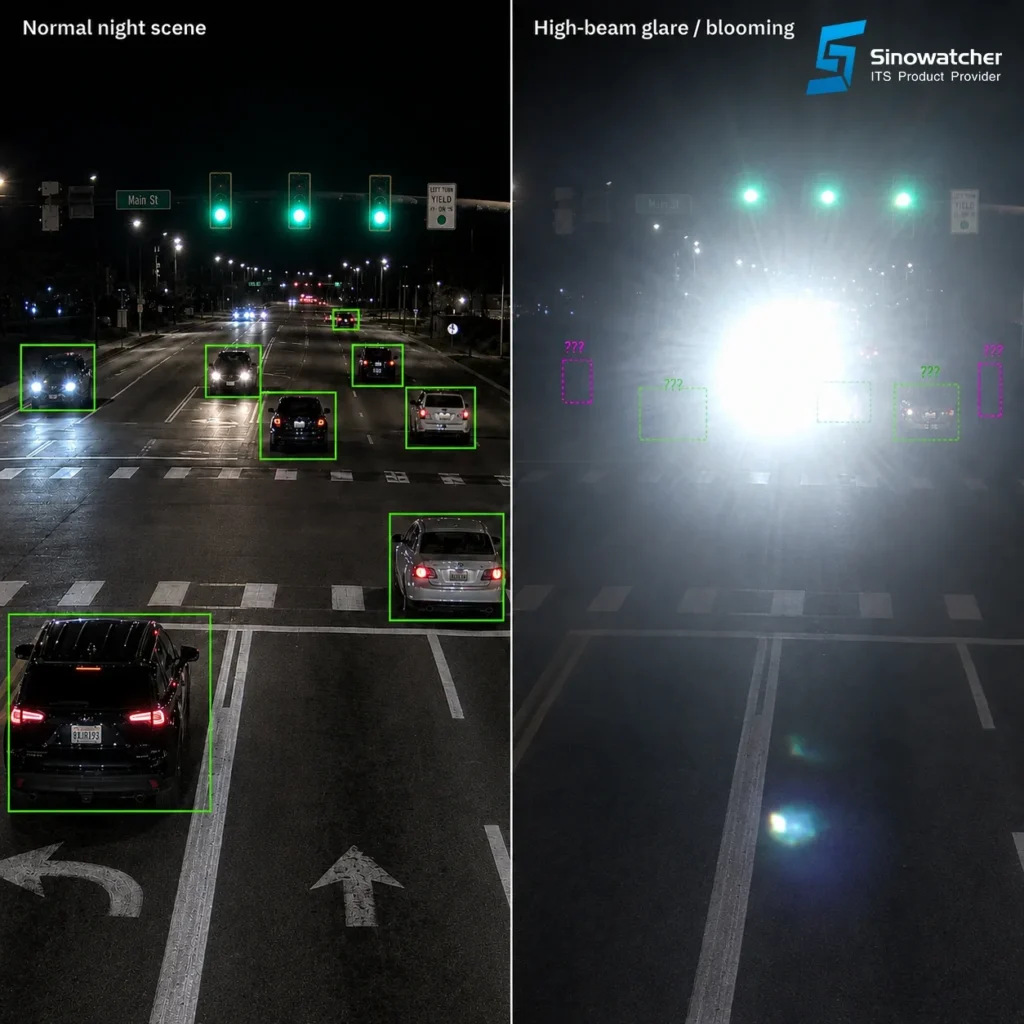
عند تقاطع حضري مظلم، يتم دفع النطاق الديناميكي لكاميرا الأمان القياسية إلى الحد المطلق.
- غسل الشعاع العالي: عندما تقترب المركبات بمصابيح أمامية عالية الشعاع أو مصابيح LED ما بعد البيع ذات محاذاة سيئة، فإن الفوتونات القادمة تغمر بكسلات المستشعر، مما يتسبب في تشبع البكسل الزائد أو ازدهارها،
- فشل الخوارزمية: وفقًا لخوارزمية الكشف القياسية، تطمس هذه الهالة البيضاء الساطعة الحدود المادية الفعلية والحواف الهيكلية وخطوط السيارة. وبسبب هذا الفقدان العميق للتباين، تفشل آلية اكتشاف الحواف في النظام في عزل حدود السيارة عن الوهج الشديد. ونتيجة لذلك، تعاني الشبكة المرئية في كثير من الأحيان من "دمج الأهداف" - حيث تنزف المركبات المجاورة في كتلة تتبع واحدة إلى جانب ارتفاع المعدلات الإيجابية الكاذبة وفرص التتبع الضائعة.
ب. التوهين الجوي الشديد

في الطقس المثالي، ينتقل الضوء دون أي عائق. ومع ذلك، يجب أن تعمل البنية التحتية الحضرية بشكل لا تشوبه شائبة أثناء الأزمات المناخية المحلية:
- خط المطر وتأثير قطرة العدسة: تخلق الأمطار الغزيرة "خطوط مطر" مادية في الهواء تعمل على تفكيك الاستمرارية البصرية، بينما تعمل قطرات الماء الموجودة على زجاج الغلاف على تشويه الضوء مثل عدسة مشوهة. يتم الخلط بين خوارزميات طرح الخلفية أو اكتشاف الحواف القياسية بسبب الحركة المستمرة لخطوط المطر، مما يؤدي إلى إتلاف أعداد الحجم.
- فخ تشتت الضباب: يقدم الضباب الكثيف مياهًا مجهرية معلقة في الهواء، مما يتسبب في تشتت مي. يرتد الضوء الصادر من مصابيح الشوارع والمصابيح الأمامية عن الضباب، مما يؤدي إلى خفض تباين الصورة إلى ما يقرب من الصفر. عندما ينخفض التباين، لم تعد الشبكة العصبية البصرية قادرة على استخراج ناقلات المعالم من الخلفية، مما يجعل الكاميرا عمياء على مسافات تتجاوز 30 إلى 40 مترًا.
2. العيب في الهندسة المكانية: انسداد المنظور
ينبع أحد التحديات الهيكلية الأكثر استمرارًا في اكتشاف حركة مرور الفيديو من العرض الأساسي من منظور ثلاثي الأبعاد إلى ثنائي الأبعاد. يتم تثبيت الكاميرات حتمًا على أعمدة مرتفعة على جانب الطريق أو جسور أفقية، بحيث تكون مائلة نحو الأسفل نحو الأسفل.
الحصار على خط البصر

عندما تقوم شاحنة تجارية كبيرة، أو حافلة نقل عام ذات طابقين، أو شبه حاوية ثقيلة بإيقاف بصمتها الهائلة عند شريط التوقف، فإنها تخلق مساحة هائلة. أعاقت الشاحنة الشاهقة مجال رؤية الكاميرا تمامًا، واحتلت غالبية ميدان التصوير؛ وفي الوقت نفسه، ألقت نقطة عمياء - ظلًا - على الرصيف الإسفلتي الذي يقع خلفها مباشرة، حتى أنها تعدت على الممرات المجاورة. تفشل المركبات الصغيرة المحاصرة داخل هذه المساحة في تسجيل بكسل واحد على مستشعر الصورة.
- السيارة المختفية: نظرًا لأن الضوء ينتقل في خط مستقيم، فإن المركبات الصغيرة (مثل سيارات السيدان المدمجة والدراجات البخارية ودراجات التوصيل الإلكترونية) التي تتأخر عن كثب خلف الشاحنة تكون مخفية تمامًا داخل هذا الظل.
- تمزق البيانات: إذا لم تتمكن الكاميرا من التقاط حتى عدد قليل من البكسلات للمركبة المخفية، فإن نظام الكشف يسجل المسار على أنه "فارغ". يؤدي هذا إلى انخفاض كبير في حجم السيارة ويفسد تمامًا تقدير طول قائمة الانتظار في الوقت الفعلي الذي تتطلبه وحدات التحكم في إشارات المرور التكيفية لحساب نوافذ الضوء الأخضر المناسبة.
3. النقاط الهيكلية العمياء لتتبع حركة الرادار.
لتجاوز نقاط الضعف البصرية للكاميرات، تحول العديد من شركات تكامل أنظمة النقل الذكية (ITS) إلى كشف حركة المرور الرادارية (رادار الموجات المليمترية المستقل). يرسل الرادار موجات كهرومغناطيسية ويقيس إزاحة دوبلر للإشارات المرتجعة لتحديد السرعة والمسافة. في حين أن الرادار النقي محصن ضد الطقس، فإنه يواجه مجموعة مختلفة تمامًا من الحواجز المادية والرياضية في الشبكات الحضرية:
أ.السرعة الصفرية / مصيدة الهدف الثابتة ملليمتر
يتميز الرادار الموجي بكفاءة عالية في اكتشاف الأجسام المتحركة لأن الأهداف المتحركة تخلق تغيرًا واضحًا في التردد (تأثير دوبلر). ومع ذلك، عندما تضرب موجة جسمًا ثابتًا، فإنها تولد انعكاسًا ثابتًا.
- مشكلة الفوضى: في بيئة المدينة الكثيفة، تأتي الانعكاسات الساكنة من كل شيء: الدرابزين المعدني، والحواجز الخرسانية، واللافتات العلوية، والمباني على جانب الطريق. يُعرف هذا باسم "الفوضى".
- خطأ قائمة الانتظار المجمدة: ولمنع الفوضى من إرباك المعالج، يقوم الرادار التقليدي بتصفية الانعكاسات الثابتة. الآثار الجانبية الخطيرة؟ عندما يتباطأ خط من المركبات ويتوقف تمامًا عند الإشارة الحمراء، فإنها تصبح كائنات ثابتة. يكافح الرادار لفصل السيارات الثابتة عن حواجز الحماية المعدنية الثابتة، مما يؤدي غالبًا إلى سقوط الأهداف المتعقبة عن الشاشة. وبالتالي، لا يمكن للرادار المستقل حساب أطوال قائمة الانتظار المستمرة بشكل موثوق أو اكتشاف حادث مركبة متوقفة عند التقاطع.
ب.ضعف تصنيف الأهداف ودقة الشبكة
يعمل الرادار على المقطع العرضي الكهرومغناطيسي، وليس على الميزات المرئية.
- العجز في الصورة الظلية: يكتشف مستقبل الرادار سحابة نقطية أو مجموعة من عوائد الطاقة. فهو يعلم أن شيئًا ضخمًا يتحرك بسرعة 45 كم/ساعة، لكنه لا يستطيع تحديد ما إذا كان هذا الجسم عبارة عن حافلة مدينة طويلة، أو سيارة ركاب تجر مقطورة، أو ثلاث دراجات نارية مكتظة تركب جنبًا إلى جنب.
- كابوس المرور المختلط: في تقاطع حضري فوضوي حيث تتقاسم الممرات السيارات ودراجات التوصيل الإلكترونية والمشاة، لا يستطيع الرادار المستقل فصلها بدقة. هذا النقص في معلومات التصنيف يمنع وحدة التحكم في حركة المرور من إعطاء الأولوية لمستخدمي الطريق المعرضين للخطر أو تنفيذ أولوية إشارة النقل المتقدمة.
معضلة التكامل
إذا كان تقاطعك يعتمد فقط على الفيديو، فسيكون نظامك عرضة للعمى الناتج عن عاصفة ثلجية مفاجئة في منتصف الليل أو العوارض العالية المسببة للعمى. إذا كان تقاطعك يعتمد فقط على الرادار، فستفقد القدرة على تصنيف أنواع المركبات، أو تحديد حركة المرور غير الآلية، أو تتبع قوائم الانتظار الثابتة بشكل موثوق. إن الاعتماد على طريقة استشعار واحدة يجبر مهندسي المرور على قبول البيانات الخاطئة.
ما هو التالي: إدراكًا لهذه الحواجز المادية المطلقة، كيف يقوم المهندسون المعاصرون بإعادة تصميم الأجهزة البصرية لتحقيق دقة اكتشاف تزيد عن 95% في ظل انعدام الضوء والانسداد؟
اقرأ الجزء الثاني: تحدي حدود الرؤية: كيف تحل خوارزميات Edge-AI وخوارزميات المنطقة العمياء انسداد حركة المرور لمعرفة ذلك.

")








