















En el modelo de ciudad inteligente y sistemas de transporte inteligentes (ITS), el sistema de detección de vehículos de tráfico actúa como los "ojos" cruciales de la ciudad. Para implementar el control adaptativo de señales, la coordinación de ondas verdes y el análisis preciso de big data del tráfico, los departamentos municipales dependen de la recopilación altamente precisa y en tiempo real del flujo de tráfico, la velocidad, la longitud de las colas y el espaciado de los intervalos.
Sin embargo, cualquier ingeniero de tráfico que haya gestionado una intersección urbana del mundo real sabe una dolorosa verdad: lo que funciona perfectamente en un entorno de laboratorio controlado a menudo toca un techo físico en las caóticas calles de la ciudad. Al diseñar un sistema robusto, los equipos de ingeniería suelen utilizar de forma predeterminada una de dos categorías de sensores estándar: visión pura (cámaras ópticas) o radar independiente (seguimiento de ondas milimétricas). Si bien ambos han madurado significativamente, las vías urbanas del mundo real introducen variables no lineales e impredecibles que llevan las arquitecturas de un solo sensor más allá de sus límites físicos.
Para comprender cómo superar estos fallos, primero debemos analizar los profundos obstáculos técnicos que afectan a la detección de tráfico por vídeo y a la detección de tráfico por radar tradicionales.
Los cuellos de botella ópticos y ambientales de la detección de tráfico de vídeo independiente
La detección de tráfico por vídeo se ve favorecida a nivel mundial porque replica la visión humana, capturando datos semánticos ricos como el posicionamiento carril por carril, la clasificación de objetos y la ocupación espacial. Sin embargo, debido a que los sistemas ópticos dependen completamente del reflejo de los fotones ambientales en un sensor de imagen, su precisión está directamente ligada a la visibilidad ambiental.
A.El dilema del deslumbramiento y el rango dinámico nocturno
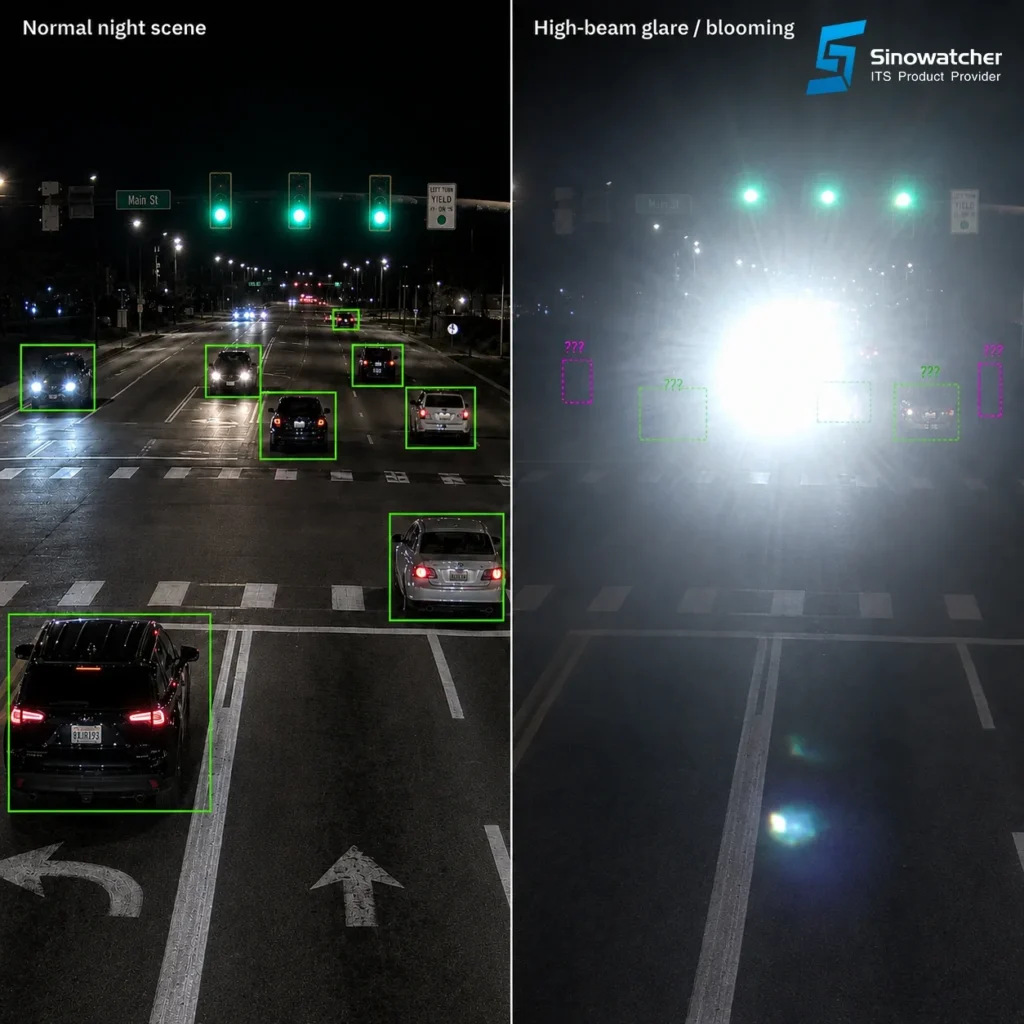
En una intersección urbana oscura, el rango dinámico de una cámara de seguridad estándar se lleva a su umbral absoluto.
- El derrumbe de las luces altas: Cuando los vehículos se acercan con luces altas o LED no originales mal alineados, los fotones que se aproximan inundan los píxeles del sensor, provocando una sobresaturación o floración de píxeles.
- Fallo del algoritmo: Según un algoritmo de detección estándar, este halo blanco brillante borra los límites físicos, los bordes estructurales y los contornos reales del vehículo. Debido a esta profunda pérdida de contraste, el mecanismo de detección de bordes del sistema no logra aislar los límites del vehículo del intenso resplandor. En consecuencia, la red visual sufre con frecuencia una "fusión de objetivos", donde los vehículos adyacentes se fusionan en un solo bloque de seguimiento junto con tasas de falsos positivos aumentadas y oportunidades de seguimiento perdidas.
B.Atenuación meteorológica severa

En condiciones climáticas ideales, la luz viaja sin perturbaciones. Sin embargo, la infraestructura urbana debe funcionar sin problemas durante las crisis climáticas localizadas:
- La línea de lluvia y el efecto gota de lente: La lluvia torrencial crea “líneas de lluvia” físicas en el aire que rompen la continuidad visual, mientras que las gotas de agua en el cristal de la carcasa distorsionan la luz como una lente deformada. Los algoritmos estándar de sustracción de fondo o detección de bordes se confunden con el movimiento constante de las rayas de lluvia, lo que da lugar a recuentos de volumen corruptos.
- La trampa de dispersión de niebla: Una densa niebla introduce agua microscópica suspendida en el aire, lo que provoca la dispersión de Mie. La luz de las farolas y los faros rebota en la niebla, reduciendo el contraste de la imagen a casi cero. Cuando el contraste cae, la red neuronal visual ya no puede extraer vectores de características del fondo, lo que hace que la cámara quede ciega a distancias superiores a 30 o 40 metros.
2. El defecto de la geometría espacial: oclusión en perspectiva
Uno de los desafíos estructurales más persistentes en la detección del tráfico por vídeo surge de la proyección básica en perspectiva de 3D a 2D. Las cámaras inevitablemente se montan en postes elevados al borde de la carretera o en pórticos horizontales, en ángulo hacia el asfalto.
El bloqueo de la línea de visión

Cuando un camión comercial grande, un autobús de transporte público de dos pisos o un semicontenedor pesado detiene su enorme huella en una barra de parada, crea una enorme. El imponente camión obstruyó completamente el campo de visión de la cámara, ocupando la mayor parte del campo de tiro; Al mismo tiempo, proyectaba un punto ciego (una sombra) sobre el asfalto justo detrás de él, invadiendo incluso los carriles adyacentes. Los vehículos más pequeños atrapados dentro de esta huella no registran ni un solo píxel en el sensor de imagen.
- El coche que desaparece: Debido a que la luz viaja en línea recta, los vehículos más pequeños (como sedanes compactos, scooters y bicicletas eléctricas de reparto) que siguen de cerca al camión quedan completamente ocultos dentro de esta sombra.
- Ruptura de datos: Si la cámara no puede capturar ni siquiera unos pocos píxeles del vehículo oculto, el sistema de detección registra el carril como "vacío". Esto conduce a un conteo enorme del volumen de vehículos y corrompe por completo la estimación de la longitud de la cola en tiempo real que requieren los controladores de señales de tráfico adaptativos para calcular las ventanas de luz verde adecuadas.
3. Los puntos ciegos estructurales del seguimiento por detección de tráfico por radar.
Para evitar las vulnerabilidades visuales de las cámaras, muchos integradores ITS recurrieron a la detección de tráfico por radar (radar independiente de ondas milimétricas). El radar envía ondas electromagnéticas y mide el desplazamiento Doppler de las señales devueltas para determinar la velocidad y la distancia. Si bien es inmune al clima, el radar puro encuentra un conjunto completamente diferente de obstáculos físicos y matemáticos en las redes urbanas:
A.El milímetro de trampa de objetivo estacionario/de velocidad cero
El radar de ondas es muy eficaz para detectar objetos en movimiento porque los objetivos en movimiento crean un cambio de frecuencia distinto (efecto Doppler). Sin embargo, cuando una onda golpea un objeto estático, genera una reflexión estacionaria.
- El problema del desorden: En un entorno urbano denso, los reflejos estáticos provienen de todo: barandillas metálicas, barreras de hormigón, señales elevadas y edificios al borde de la carretera. Esto se conoce como "desorden".
- El defecto de la cola congelada: Para evitar que el desorden abrume al procesador, el radar tradicional filtra los reflejos estáticos. ¿El peligroso efecto secundario? Cuando una fila de vehículos reduce la velocidad y se detiene completamente en un semáforo en rojo, se convierten en objetos estáticos. El radar lucha por separar los vagones parados de las barandillas metálicas estacionarias, lo que a menudo provoca que los objetivos rastreados simplemente desaparezcan de la pantalla. En consecuencia, un radar independiente no puede calcular de forma fiable la longitud de las colas continuas ni detectar un incidente de vehículo calado en una intersección.
B. Clasificación de objetivos y resolución de cuadrícula deficientes
El radar funciona según una sección transversal electromagnética, no sobre características visuales.
- El déficit de silueta: Un receptor de radar detecta una nube de puntos o un grupo de retornos de energía. Sabe que algo masivo se mueve a 45 km/h, pero no puede determinar si ese objeto es un autobús urbano largo, un automóvil de pasajeros que arrastra un remolque o tres motocicletas apretadas que viajan una al lado de la otra.
- La pesadilla del tráfico mixto: En una intersección urbana caótica donde los carriles son compartidos por automóviles, bicicletas eléctricas de reparto y peatones, un radar independiente no puede segregarlos con precisión. Esta falta de inteligencia de clasificación impide que el controlador de tránsito dé prioridad a los usuarios vulnerables de la vía o ejecute una prioridad avanzada de señales de tránsito.
El dilema de la integración
Si su intersección depende únicamente del video, su sistema es vulnerable a la ceguera debido a una repentina tormenta de nieve de medianoche o luces altas cegadoras. Si su intersección depende únicamente del radar, perderá la capacidad de clasificar tipos de vehículos, identificar el tráfico no motorizado o rastrear colas estáticas de manera confiable. Depender de una única modalidad de sensor obliga a los ingenieros de tráfico a aceptar datos erróneos.
Qué sigue: reconociendo estas barreras físicas absolutas, ¿cómo están rediseñando los ingenieros modernos el hardware óptico para lograr una precisión de detección superior al 95% en condiciones de oclusión y luz cero?
Lea la Parte 2: Desafiando los límites de la visión: cómo la IA perimetral y los algoritmos de áreas ciegas resuelven la oclusión del tráfico para descubrirlo.

")








