















В проекте «Умный город» и «Интеллектуальные транспортные системы» (ИТС) система обнаружения транспортных средств действует как важнейшие «глаза» города. Чтобы реализовать адаптивное управление сигналами, координацию «зеленой волны» и точный анализ больших данных о дорожном движении, муниципальные департаменты полагаются на высокоточный сбор данных о транспортном потоке, скорости, длине очередей и интервалах между полосами движения в режиме реального времени.
Однако любой инженер-транспортник, управлявший реальным городским перекрестком, знает горькую правду: то, что безупречно работает в контролируемой лабораторной среде, часто достигает физического потолка на хаотичных городских улицах. При проектировании надежной системы инженерные группы обычно по умолчанию используют одну из двух стандартных категорий датчиков: чистое зрение (оптические камеры) или автономный радар (отслеживание в миллиметровом диапазоне волн). Хотя оба они значительно усовершенствовались, в реальных городских дорогах появляются нелинейные и непредсказуемые переменные, которые выводят архитектуры с одним датчиком за пределы их физических пределов.
Чтобы понять, как преодолеть эти сбои, мы должны сначала проанализировать глубокие технические узкие места, которые мешают традиционному видеообнаружению трафика и радиолокационному обнаружению трафика.
Оптические и экологические узкие места автономного видеообнаружения трафика
Видеообнаружение дорожного движения пользуется популярностью во всем мире, поскольку оно воспроизводит человеческое зрение, собирая богатые семантические данные, такие как расположение полос за полосами, классификация объектов и пространственная занятость. Однако, поскольку оптические системы полностью полагаются на отражение фотонов окружающей среды на датчике изображения, их точность напрямую зависит от видимости окружающей среды.
A.Дилемма ночного динамического диапазона и бликов
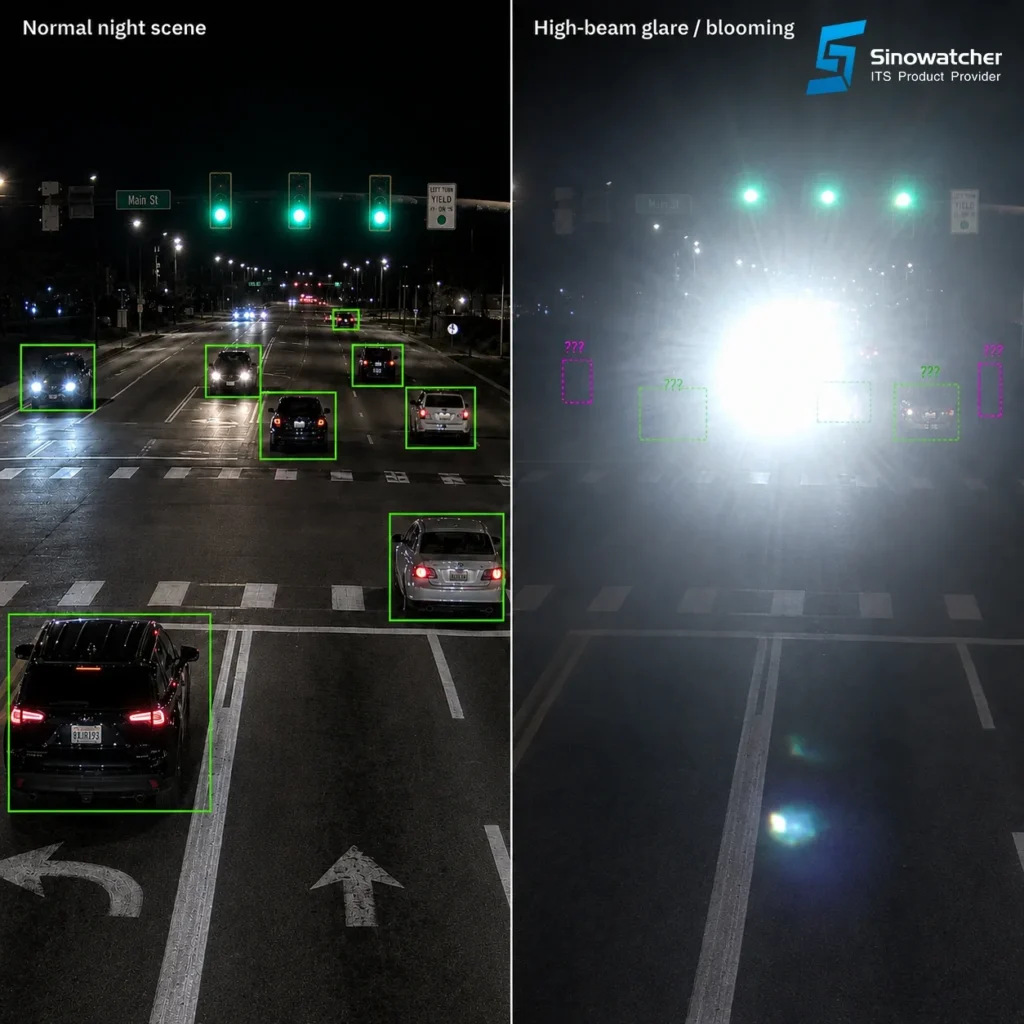
На темном городском перекрестке динамический диапазон стандартной камеры видеонаблюдения достигает своего абсолютного порога.
- Размытие дальнего света: Когда транспортные средства приближаются с дальним светом фар или плохо выровненными светодиодами вторичного рынка, встречные фотоны заполняют пиксели датчика, вызывая перенасыщение или размытие пикселей,
- Сбой алгоритма: Согласно стандартному алгоритму обнаружения, этот яркий белый ореол стирает реальные физические границы, структурные края и контуры автомобиля. Из-за такой глубокой потери контрастности механизм обнаружения краев системы не может изолировать границы транспортного средства от яркого света. Следовательно, визуальная сеть часто страдает от «слияния целей», когда соседние транспортные средства сливаются в единый блок отслеживания, что приводит к резкому увеличению количества ложных срабатываний и упущенным возможностям отслеживания.
B.Сильное метеорологическое ослабление

В идеальную погоду свет распространяется спокойно. Однако городская инфраструктура должна работать безупречно во время локальных климатических кризисов:
- Линия дождя и эффект капель линзы: Проливной дождь создает в воздухе физические «линии дождя», которые нарушают визуальную непрерывность, а капли воды на стекле корпуса искажают свет, как искривленная линза. Стандартные алгоритмы вычитания фона или обнаружения краев сбиваются с толку из-за постоянного движения полос дождя, что приводит к искажению подсчета объема.
- Ловушка рассеяния тумана: Плотный туман содержит микроскопическую воду, взвешенную в воздухе, вызывая рассеяние Ми. Свет уличных фонарей и фар отражается от тумана, снижая контрастность изображения почти до нуля. Когда контраст падает, визуальная нейронная сеть больше не может извлекать векторы признаков из фона, что делает камеру слепой на расстояниях более 30–40 метров.
2. Дефект пространственной геометрии: затенение перспективы
Одна из наиболее устойчивых структурных проблем при обнаружении видеотрафика связана с базовой перспективной проекцией из 3D в 2D. Камеры неизбежно монтируются на приподнятых придорожных столбах или горизонтальных платформах, наклоненных к асфальту.
Блокада прямой видимости

Когда большой коммерческий грузовик, двухэтажный общественный автобус или тяжелый контейнеровоз останавливается на остановке, это создает массивный след. Высокий грузовик полностью закрывал поле зрения камеры, занимая большую часть стрельбища; одновременно он отбрасывал слепое пятно – тень – на асфальт прямо за ним, вторгаясь даже в соседние полосы движения. Меньшие транспортные средства, попавшие в зону действия этого следа, не могут зарегистрировать ни одного пикселя на датчике изображения.
- Исчезающая машина: Поскольку свет распространяется по прямой линии, небольшие транспортные средства (такие как компактные седаны, скутеры и электронные велосипеды), следующие за грузовиком, полностью скрыты в этой тени.
- Разрыв данных: Если камера не может запечатлеть даже несколько пикселей скрытого автомобиля, система обнаружения регистрирует полосу как «пустую». Это приводит к значительному занижению объема транспортных средств и полностью искажает оценку длины очереди в реальном времени, необходимую адаптивным контроллерам светофоров для расчета правильных окон зеленого света.
3. Структурные «слепые зоны» радарного отслеживания движения.
Чтобы обойти визуальные уязвимости камер, многие интеграторы ИТС обратились к радару Traffic Detection (автономный радар миллиметрового диапазона). Радар посылает электромагнитные волны и измеряет доплеровский сдвиг возвращаемых сигналов, чтобы определить скорость и расстояние. Невосприимчивый к погоде, чистый радар сталкивается с совершенно другим набором физических и математических препятствий в городских сетях:
A.Миллиметровая ловушка с нулевой скоростью/стационарной мишенью
Волновой радар очень эффективен при обнаружении движущихся объектов, поскольку движущиеся цели создают отчетливый сдвиг частоты (эффект Доплера). Однако когда волна сталкивается со статическим объектом, она генерирует стационарное отражение.
- Проблема беспорядка: В густонаселенной городской среде статические отражения исходят от всего: от металлических ограждений, бетонных ограждений, надземных знаков и придорожных зданий. Это известно как «беспорядок».
- Недостаток замороженной очереди: Чтобы предотвратить перегрузку процессора помехами, традиционный радар отфильтровывает статические отражения. Опасный побочный эффект? Когда очередь транспортных средств замедляется и полностью останавливается на красный свет, они становятся статичными объектами. Радар с трудом отделяет неподвижные автомобили от неподвижных металлических ограждений, из-за чего отслеживаемые цели часто просто выпадают за пределы экрана. Следовательно, автономный радар не может надежно рассчитать длину непрерывной очереди или обнаружить заглохшее транспортное средство на перекрестке.
B. Плохая классификация целей и разрешение сетки
Радар работает на основе электромагнитного сечения, а не визуальных характеристик.
- Дефицит силуэта: Приемник радара обнаруживает облако точек или кластер возвратной энергии. Он знает, что что-то массивное движется со скоростью 45 км/ч, но не может определить, является ли этот объект длинным городским автобусом, легковым автомобилем с прицепом или тремя плотно набитыми мотоциклами, едущими бок о бок.
- Кошмар смешанного движения: На хаотичном городском перекрестке, где полосы движения разделяют автомобили, электровелосипеды и пешеходы, автономный радар не может точно их разделить. Отсутствие классификационной информации не позволяет диспетчеру дорожного движения определять приоритетность уязвимых участников дорожного движения или выполнять расширенный приоритет транзитных сигналов.
Дилемма интеграции
Если ваш перекресток использует только видео, ваша система уязвима к ослеплению из-за внезапной полуночной метели или ослепляющего дальнего света. Если на вашем перекрестке используется только радар, вы теряете возможность классифицировать типы транспортных средств, идентифицировать немоторизованное движение или надежно отслеживать статические очереди. Использование одного датчика вынуждает инженеров дорожного движения принимать ошибочные данные.
Что дальше: Признавая эти абсолютные физические барьеры, как современные инженеры перепроектируют оптическое оборудование, чтобы достичь точности обнаружения выше 95% в условиях нулевого освещения и окклюзии?
Прочтите Часть 2. Преодолев ограничения зрения: как алгоритмы Edge-AI и слепых зон решают проблему пробок на дорогах, чтобы узнать это.

")








