















В нашей предыдущей статье мы разобрали серьезные физические ограничения, с которыми сталкивается традиционное видеообнаружение дорожного движения на городских улицах, уделив особое внимание тому, как динамическая окклюзия (большие грузовики блокируют маленькие автомобили) и динамический диапазон звездного света приводят к катастрофическим сбоям в передаче данных для адаптивного управления сигналом.
Чтобы решить эти визуальные проблемы, система обнаружения транспортных средств не может просто полагаться на стандартные компоненты безопасности. Он должен превратиться в узкоспециализированный центр периферийных вычислений. Сегодня мы углубимся в то, как аппаратный Edge-AI и алгоритмические инновации меняют игру, расширяя границы возможностей оптического обнаружения с помощью Sinowatcher. Видеодетектор транспортных средств.
1. Работа видеодетектора транспортных средств в условиях низкой освещенности
ST-VD5 полностью обходит ограничения стандартного оборудования для наблюдения, используя 1/2,5-дюймовый 5-мегапиксельный CMOS-датчик изображения премиум-класса уровня Starlight.
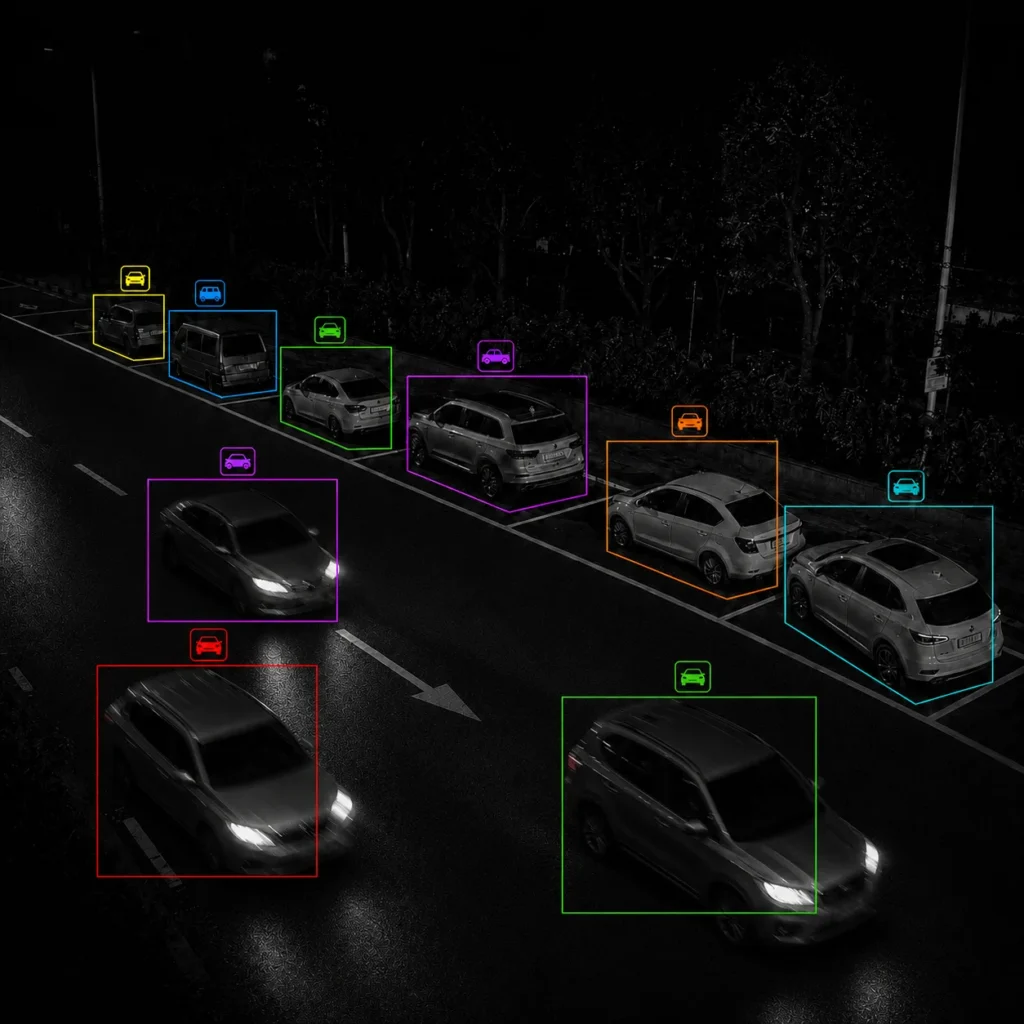
- Покорение темных дорог: при минимальном пороге освещенности до 0,0001 люкс в черно-белом режиме он четко «видит» даже на неосвещенных или плохо освещенных городских дорогах, где традиционные алгоритмы не работают из-за яркого света фар.
- Локализованная обработка: при поддержке внутреннего NPU (чипа ускорения нейронной сети), использующего алгоритмы глубокого обучения, он обрабатывает данные локально со сверхнизкой задержкой, обеспечивая полную степень обнаружения ≥ 95%
Обнаружение препятствий для движения транспорта с алгоритмами компенсации слепых зон

Чтобы противодействовать изъяну «блокирования крупных транспортных средств», которое уже давно мешает подсчетам муниципального трафика, Видеодетектор транспортных средств имеет сложный алгоритм компенсации слепых зон.
Вместо того, чтобы рассматривать дорогу как плоскую 2D-плоскость, система устанавливает точные координаты входа (вход головы) и координаты выхода (выход хвоста) в поперечном сечении обнаружения. Регистрируя эти временные метки поперечного сечения, система математически делает вывод, остановлено ли транспортное средство меньшего размера в закрытой зоне позади грузовика.
Это повышает точность длины очереди до ≥ 90%, предоставляя контроллерам светофоров точные данные, необходимые для оптимизации адаптивных зеленых волн и предотвращения локализованного обратного потока.
2. Классификация расширенных видеодетекторов транспортных средств для анализа городского трафика
Вместо того, чтобы объединять мультимодальные транспортные потоки в единый недифференцированный поток данных, видеодетектор транспортных средств выполняет классификацию в реальном времени по строго определенной городской таксономии, изолируя легковые автомобили, тяжелые грузовые автомобили, транзитные автобусы и двухколесные транспортные средства. Одновременно с этим периферийный процессор отображает критически важную оперативную аналитику, генерируя непрерывные наборы данных о пространственной занятости, временной занятости и движении транспортных средств.
| Функция/показатель | Возможности ST-VD5 | Ценность для системных интеграторов ИТС |
| Расстояние обнаружения | 80-100 метров (охватывает до 4 полос) | На каждом перекрестке требуется меньше устройств; значительная экономия средств на оборудовании. |
| Протоколы интеграции | GB28181, ONVIF, RTSP, GAT920 | Легко подключается к существующим городским платформам, не беспокоясь о проприетарных решениях. |
| Полевая устойчивость | Защита от атмосферных воздействий IP66 и устойчивость к температуре от -40°C до 70°C | Не требует технического обслуживания в условиях палящей жары или ледяной метели. |
3. Установка видеодетектора транспортных средств и оптимизация развертывания на местах
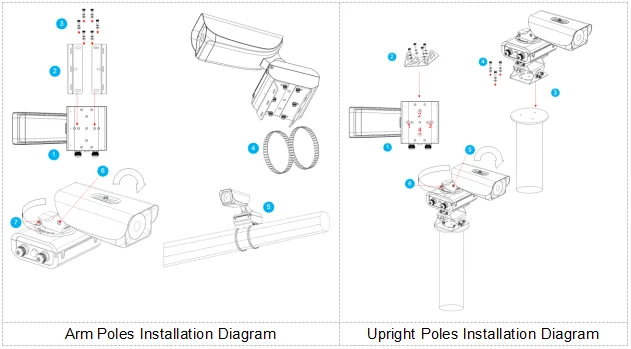
Программное обеспечение с высокими техническими характеристиками теряет свою ценность, если на настройку устройства уходит несколько часов или оно легко смещается со своего места. Видеодетектор транспортных средств имеет двухмерную независимую конструкцию регулировки (горизонтальное вращение + наклон). Эта механическая инновация позволяет инженерам на местах быстро и точно совмещать три сечения обнаружения камеры с физическими линиями движения, полностью устраняя традиционные «слепые зоны» при установке.
4. Объединение радара и видео для всепогодного обнаружения дорожного движения
В то время как алгоритмы Edge-AI и технологии изображения звездного света значительно улучшили производительность оптического обнаружения дорожного движения, системы обнаружения дорожного движения на основе видения по-прежнему сталкиваются с ограничениями в условиях экстремальной плохой видимости, таких как сильный снегопад, густой туман, песчаные бури или плохо освещенные шоссе.
Чтобы добиться более стабильного всепогодного обнаружения дорожного движения на сложных многополосных дорогах и высокоскоростных коридорах, отрасль все чаще переходит к мультисенсорным подходам, сочетающим видеоаналитику с технологиями радиолокационного обнаружения дорожного движения.
Объединение радара и видео позволяет системам обнаружения транспортных средств обеспечивать более надежную непрерывность отслеживания, стабильность обнаружения и сбор данных о дорожном движении в условиях, когда одних только оптических датчиков может быть недостаточно.
Ожидается, что по мере развития интеллектуальных транспортных систем мультисенсорное обнаружение трафика станет важным направлением интеллектуального управления дорожным движением следующего поколения.
На сайте Sinowatcher Technology Co., Ltd.Мы также готовимся представить новое решение для обнаружения транспортных средств с использованием радиолокационного и видеосигнала, которое объединяет радарное зондирование с видеоаналитикой на базе искусственного интеллекта для повышения эффективности обнаружения дорожного движения в сложных реальных условиях. Дополнительная информация об этом решении будет опубликована в будущих обновлениях.

")








